

ما را در شبکههای اجتماعی دنبال کنید:
سامانه LPV: جایگزینی برای ILS
در نسلهای اولیه ناوبری هواپیما از تجهیزاتی مانند فانوسهای زمینی، زاویهیابهای افق یا مغناطیسسنجها استفاده میشد. خلبانها زمان زیادی از طول مسیر پرواز را صرف تعیین موقعیت خود و تشخیص مسیر حرکت تا فرودگاه مقصد میکردند. اما با ظهور تجهیزات ناوبری رادیویی و گسترش آنها، حجم کاری خلبانان بطور چشمگیری کاهش یافت. با استفاده از این تجهیزات امکان تعیین موقعیت در هر شرایطی از روز و شب برای خلبان امکانپذیر شد. از سوی دیگر استفاده از سیستمهای رادیویی برای هدایت دقیق هواپیما به سمت باند فرود در مرحله نشستن، سوانح هوایی را به شدت کاهش داد.
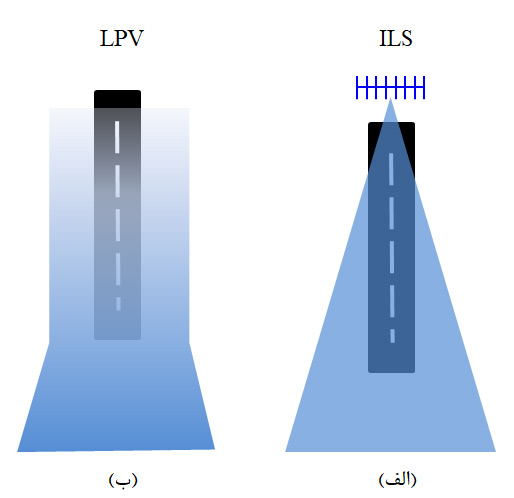
امروزه يکي از مهمترين و متداولترين دستگاههاي ناوبري برای نشستن هواپيما در فرودگاههاي پر ترافيک و فرودگاههايی با شرايط جوي نامناسب سیستم ILS سیستم ILS به زبان ساده به سیستمی گفته میشود که به خلبانها امکان فرودی ایمن را از طریق ارسال امواج رادیویی حتی در شرایطی که باند فرود برای آنها به خوبی قابل روئیت نیست میدهد. اما اینکه چطور سامانه ILS یک طرح تقرب و فرود ایمن را برای هواپیماها ایجاد میکند مستلزم آشنایی با اجزای این سامانه و نحوه کارکرد آن است. سامانهILS از دو بخش اصلی به نامهای Localizer و Glide Slope تشکیل شده است، هر چند اداره هوانوردی فدرال تقسیمبندی در این مورد انجام داده که به نظر دقیقتر و کاملتر میرسد. بر اساس اسناد FAA، اجزای این سامانه را میتوان شامل موارد زیر دانست. این اطلاعات توسط فرستندههای رادیویی Localizer و Glide Slope تامین میشود. این اطلاعت توسط فرستندههای رادیویی Marker Beacon بدست میآیند. این اطلاعات توسط چراغهای تقرب، باند فرود، محل فرود و خط وسط باند تامین میشوند. وظیفه فرستنده Localizer ارسال سیگنالهایی به صورت افقی برای قرارگیری هواپیما در وسط باند فرود است. برای این منظور فرستنده یک سیگنال ۱۵۰ هرتز در امتداد سمت راست و یک سیگنال ۹۰ هرتز در امتداد سمت چپ باند فرود ارسال میکند. در صورتی که هواپیما در هنگام فرود دقیقا در خط وسط باند قرار داشته باشد، توان سیگنالهای دریافتی از این دو فرکانس مشابه خواهد بود. با انحراف هواپیما به سمت چپ یا راست باند، توان سیگنال دریافتی یکی از دو فرکانس افزایش یافته و در نمایشگرهای مربوطه نشان داده خواهد شد. فرکانس سیگنالهای ارسالی Localizer روی باند VHF مدوله میشوند. وظیفه آنتنهای Glide Slopeارسال سیگنالهایی برای راهنمایی خلبان به منظور فرود با شیب(slope) مناسب روی باند فرود است. بدین منظور با ارسال سیگنال ۱۵۰ هرتز در پایین محدوده شیب صحیح فرود و ۹۰ هرتز در بالای آن، به خلبان برای پایین آمدن روی شیب صحیح فرود و نشستن در ابتدای باند کمک میکند. مشابه با Localizer در صورتی که هواپیما با شیب صحیح به سمت باند حرکت کند سیگنال دریافتی از دو فرکانس دارای قدرت مشابه است. در صورتی که شیب کاهش ارتفاع هواپیما بیشتر یا کمتر از حد تعیین شده باشد، قدرت سیگنال دریافتی یکی از دو فرکانس بیشتر شده و این موضوع از طریق نمایشگرها به اطلاع خلبان میرسد. سیگنالهای ارسالی این سامانه روی باند UHF مدولاسیون میشوند. در تصاویر زیر نمونهای از فرستندههای زمینی Glide Slope و همچنین نحوه ارسال سیگنالهای این سامانه و Localizer را روی باند فرود مشاهده میکنید. نمونهای از فرستندههای زمینی Glide Slope نحوه ارسال سیگنالهای Glide Slope و Localizer یکی دیگر از سیستمهای کمک ناوبری برای فرود هواپیما Beacon Marker است که اطلاعات مسافتی تا ابتدای باند را برای هواپیماها ارسال میکند. در واقع این سیستم از سه فرستنده مجزا تشکیل شده است که در فواصل مشخصی از باند فرود قرار دارند. دورترین فرستنده با فاصله 6 تا 11 کیلومتری (وابسته به شرایط جغرافیایی فرودگاه) از ابتدای باند قرار داشته و سیگنالی عمودی و مخروطی شکل را با فرکانس 400 هرتز منتشر میکند. فرستنده دوم در فاصله حدود 1 کیلومتری باند فرود نصب شده و سیگنالی عمودی و مخروطی شکل خود را در فرکانس 1300 هرتزی ارسال میکند. نزدیکترین فرستنده نیز با فاصله حدود 75 تا 450 متری از باند فرود قرار داشته و سیگنالی مشابه با دو فرستنده دیگر در فرکانس 3000 هرتزی ارسال میکند. هواپیما با گذر بر فراز هر یک از این فرستندهها سیگنال مربوطه را دریافت کرده و علائم صوتی و تصویری مرتبط با آن ایستگاه رادیویی در اختیار خلبان قرار میگیرد. فرکانس و فاصله قرار گیری فرستندههای Marker Beacon از باند فرود مجموعه سیستم ILS توانسته است کمک شایانی به هدایت هواپیماها در مرحله فرود کند؛ با این حال رشد روز افزون ترافیک هوایی و نیاز به افزایش دقت و ایمنی پروازها، مسیر را برای معرفی فناوریهای جدید هموار کرده است. نیاز به استفاده از چنین فناوریهایی بخصوص در فرودگاههایی که معمولا شرایط آبوهوایی نامساعدی دارند بیشتر احساس میشود. در چنین مواقعی نیاز است که هواپیما با دقت بسیار بیشتری به سمت باند فرود حرکت کند. از اینرو روشهای جدیدی برای هدایت هواپیماها در حساسترین مرحله پرواز معرفی شده است. در ادامه به یکی از جدیدترین این روشها که به اختصار با LPV[2] شناخته میشود و شباهت زیادی با ILS دارد خواهیم پرداخت. روش LPV یک راهکار ابزاری مدرن است که با استفاده از سیستم ماهوارهای GPS و سامانه تقویت منطقهای آن ([3]WAAS) موقعیت دقیق هواپیما را تشخیص و ارائه میدهد. نحوه کار این روش به این صورت است که از قبل اطلاعات موقعیتی فرودگاه و راهکارهای LPV مربوط به آن در سیستم مدیریت پرواز (FMS) هواپیما بارگذاری میشود. در صورتی که هواپیما به GPS-WAAS تجهیز باشد، اطلاعات موقعیت سه بعدی به سیستم FMS انتقال داده شده و عملیات راهنمایی فرود توسط این سیستم اجرا میشود. اکثر تجهیزات ساخته شده برای روش LPV در 95 درصد مواقع حدود 7 متر دقت عرضی و عمودی را فراهم میکنند. با این حال عملکرد واقعی این روش فراتر از این سطح است. در واقع سیستم WAAS هیچ گاه خطای عمودی بیش از 12 متر را مشاهده نکرده است. در این روش ارتفاع تصمیمگیری برای فرود حدود 70 متر است. این عبارت به این معنی است که در صورت شرایط جوی نامساعد یا دید کم، خلبان میتواند ارتفاع هواپیما را تا فاصله 70 متری سطح زمین کاهش دهد. اگر در این ارتفاع دید کافی وجود داشته باشد، خلبان ادامه فرایند فرود را انجام خواهد داد و در غیر این صورت با افزایش ارتفاع به سمت فرودگاه دیگری خواهد رفت. ارتفاع تصمیمگیری در سیستم LPV مشابه با سیستم ILS CAT I است. در حقیقت این دو روش از لحاظ ماهیت بسیار مشابه بوده و از دید خلبان تفاوت محسوسی وجود ندارد. برای درک تفاوتهای دو روش، بهتر است ابتدا به مشکلات و چالشهای سیستم ILS اشاره کنیم. همانطور که پیش از این گفته شد، این سیستم از تعدادی تجهیزات زمینی برای ارسال سیگنالهای راهنما استفاده میکند. هزینه نصب این تجهیزات و تعمیر و نگهداری آنها به گونهای است که برای اجرا در برخی از فرودگاههای دور افتاده و کوچک صرفه اقتصادی ندارد. مساله دیگر تداخلات سیگنال است که در فرودگاههای شلوغ بیشتر اتفاق میافتد. بازتاب سیگنال از ساختمانها، هواپیماهای دیگر و وسایل نقلیه باعث ایجاد تداخل در موج دریافتی میشود. در صورتی که این تداخلات زیاد باشد، احتمال بروز اشتباه و سانحه وجود دارد. مشکل بزرگ دیگر سیستم ILS بحث حساسیت زاویهای است. نحوه ارسال سیگنالهای Localizer و Glide Slope به گونهای است که هرچه هواپیما به انتهای باند فرود و محل نصب آنتنها نزدیک میشود، بیم انتشار باریکتر شده و این باعث افزایش حساسیت سیگنالهای دریافتی میشود. نتیجه چنین اتفاقی مشکل شدن کار خلبان برای قراردادن هواپیما در مسیر دقیق است. این مسئله در مواقعی که هواپیما در حالت خلبان خودکار قرار دارد، خود را بیشتر نشان میدهد. (الف) افزایش حساسیت سیگنال ILS با نزدیک شدن به انتهای باند. (ب) افزایش حساسیت در روش LPV تنها تا ابتدای باند. در روش LPV نیاز به نصب تجهیزات اضافه خاصی در فرودگاهها نبوده و از آنجا که سیگنالها از طریق ماهواره دریافت میشوند، تداخلات بسیار کمی وجود دارد. از سوی دیگر راهکارهای LPV برای فرودگاه به گونهای تعیین میشود که افزایش حساسیت تنها تا ابتدای باند فرود وجود داشته و پس از آن تا انتهای باند حساسیت یکسانی در نظر گرفته شده است. علاوه بر این، روش LPV به خلبانان این امکان را میدهد تا در فرودگاههایی که از روشهای ناوبری رادیویی پشتیبانی نمیکنند، فرود دقیقی داشته باشند. نکته قابل توجه در این روش عدم نیاز به آموزش جدید برای خدمه پرواز است که این فرایند جایگزینی آن را تسهیل میکند. مجموعه این مسائل برتری سیستم LPV را نسبت به ابزار ILS نشان میدهد. به منظور اجرای این روش در هواپیماها نیاز به اجرای تغییرات زیادی در ساختار هواپیما نیست. با افزودن یک گیرنده GPS-WAAS به هواپیما (درصورت عدم وجود این ابزار) و روزآمد کردن سیستم مدیریت پرواز میتوان از ویژگیها و مزایای آن استفاده کرد. مراجع: پانویس ها: [1] Instrument Landing System [2] Localizer Performance with Vertical guidance [3] Wide Area Augmentation System
فرستندهLocalizer
فرستنده Glide Slope


فرستندههای Marker Beacon
![]()
سیستم LPV

اگر مطلب برای شما مفید بود آن را در شبکههای اجتماعی به اشتراک بگذارید. بسترهای خود را انتخاب کنید!
سایر مقالات علمی و محتوای آموزشی پژوهشکده اویونیک

سیستمهای اویونیک در کابین جتهای تجاری

چهار فناوری کلیدی برای آینده پهپادها (بخش دوم)

چهار فناوری کلیدی برای آینده پهپادها (بخش اول)

فناوری EFVS

نسل جدید سیستمهای کنترل پرواز شرکت کالینز Perigon

تاثیر دیجیتالی شدن سیستمهای اویونیک بر تجارت MRO

Anthem: کابین خلبان یکپارچه شرکت هانیول

مروری بر مسیر توسعه پهپاد FX450

انتصاب دکتر شهابالدین رحمانیان به سمت رئیس پژوهشکده اویونیک
